高性能并行计算笔记
并行计算基础
粒度:在并行执行过程中,二次通讯之间每个处理机计算工作量大小的一个粗略描述。分为粗粒度、细粒度。
复杂性:在不考虑通讯开销的前提下,每个处理机上的计算量最大者,即为并行计算复杂性。
并行度:算法可以并行的程度。
加速比: $$ S_p(q)=\frac{T_s}{T_p(q)} $$ 效率: $$ E_p(q)=\frac{S_p(q)}{q} $$ Amdahl定律:假设串行计算所需要的时间$T_s=1$,$\alpha$是执行该计算所必须的串行部分所占的百分比,则有 $$ S_p(q)=\frac{1}{\alpha + \frac{1-\alpha}{q}} $$ Gustafson定律:假设并行计算所需要的时间$T_p=1$,$\alpha$是执行该并行计算所需的串行部分所占的百分比,则有 $$ S_p(q)=\frac{\alpha+(1-\alpha)\times q}{1} $$
矩阵乘并行计算
矩阵卷帘存储方式:对于一般$m\times n$分块矩阵和一般的处理机阵列$p\times q$,小块$A_{ij}$存放在处理机$P_{kl}(k=i\mod p,l=j\mod q)$中。
串行矩阵乘法:略,注意循环顺序。
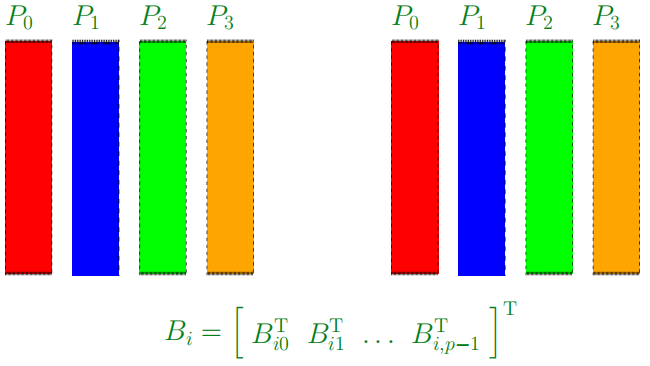
行列分块算法:
$A_i,B_i,C_{i,j},j=0,1,…,p-1$存放在$P_i$中,这种存放方式使数据在处理机中不重复。由于使用$p$个处理机,每次每个处理机计算出一个$C_{i,j}$,计算$C$需要$p$次来完成。$C_{i,j}$的计算是按对角线进行的。
其中,C按行分块,处理机间传输B的分块:

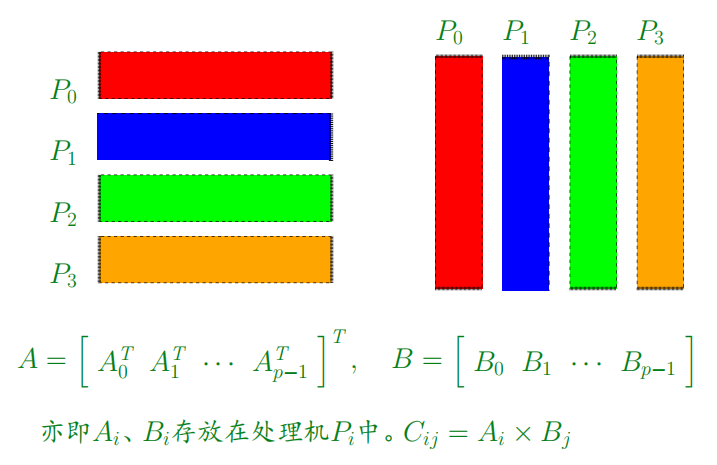
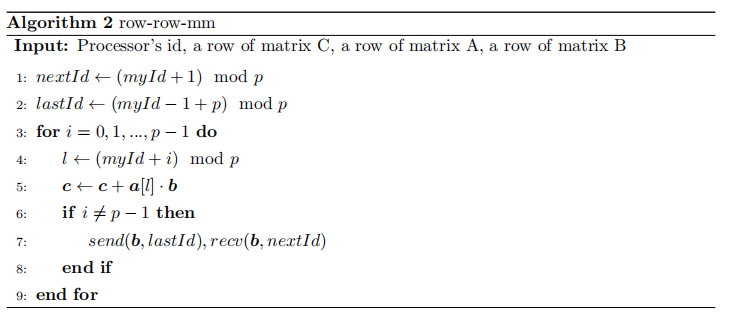
行行分块算法:

$$ C_{i,*}=A_{i,*}B=\sum_{j=0}^{p-1}A_{i,j}B_{j,*} $$
其中,C按行分块,处理机间传送B的分块:
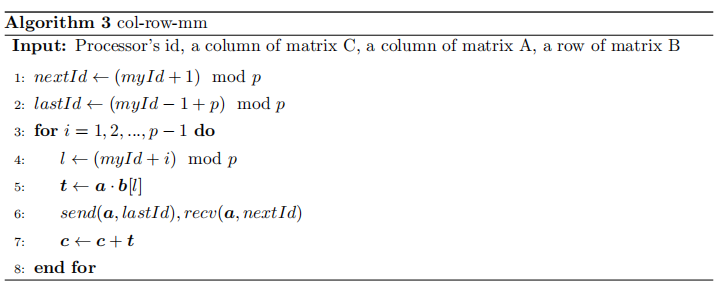
列行分块算法:
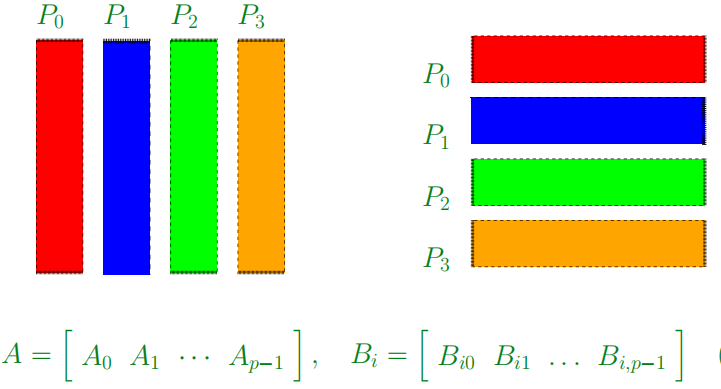
$$ C_{*,j}=\sum_{i=0}^{p-1}A_{*,i}B_{i,j} $$ C按列分块,处理机间通讯所传输的是计算的部分积:
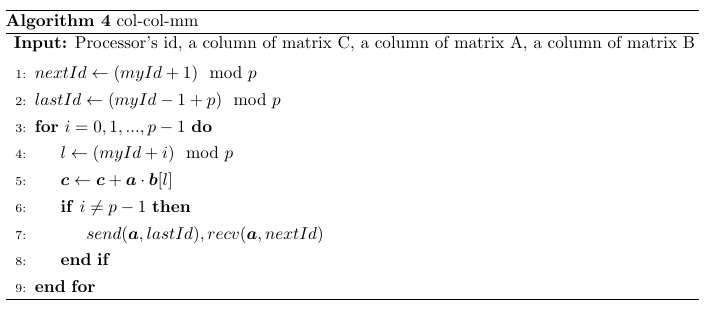
列列分块算法:
$$ C_{*,j}=\sum_{i=0}^{p-1}A_{*,i}B_{i,j} $$ C按列分块,计算过程传送矩阵A的分块:
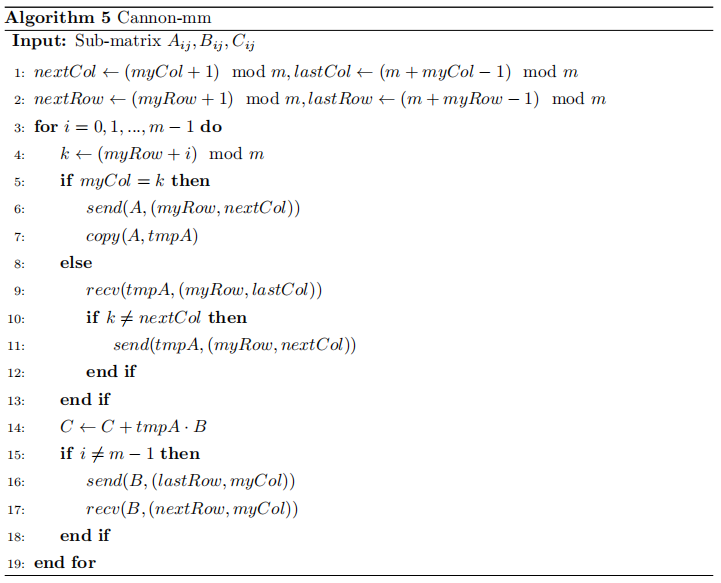
Cannon算法:
MPI学习笔记(四):矩阵相乘的Cannon卡农算法 - 惊小呆520 - 博客园 (cnblogs.com)
主要的思路是A子矩阵横向循环传送,B子矩阵纵向循环传送。
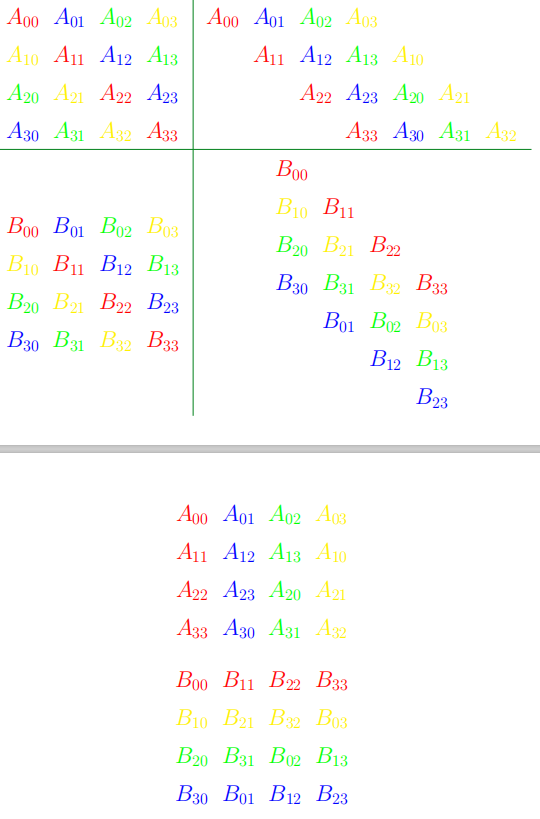
子矩阵预重排:
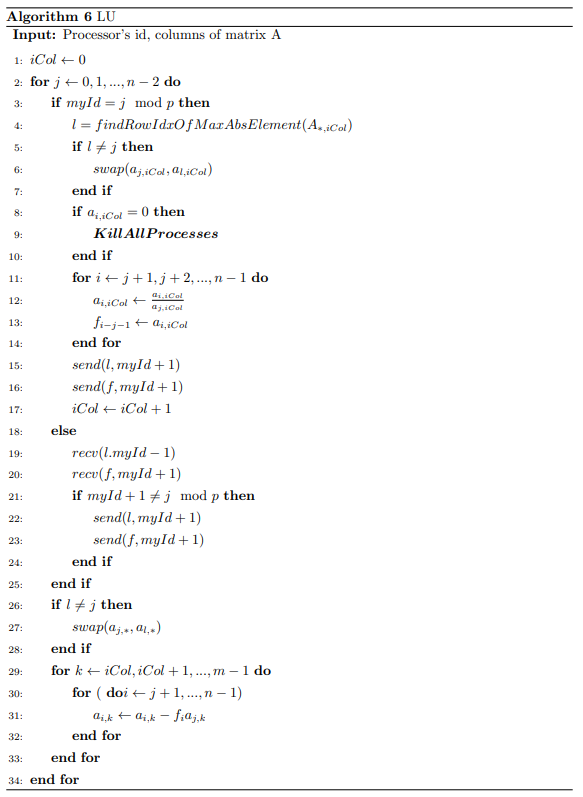
LU分解
矩阵以一维卷帘方式存储,矩阵的第$i$列存放在$P_{i\mod p}$中。
迭代求解
Jacobi迭代法:每次使用上一轮的结果迭代求解直到收敛,易于并行。 $$ x^{(0)}=(x_1^{(0)},x_2^{(0)},…,x_n^{(0)})^T \ x_i^{(k+1)}=\frac{1}{a_{ii}}(b_i-\sum_{j\neq i}^na_{ij}x_j^{(k)}),k=1,2,… $$ Gauss-Seidel迭代法:每次迭代都使用部分更新的数据,不易于并行。
FFT
内容量大,此文从略。